
Missile defense is a system, weapon, or technology involved in the detection, tracking, interception, and destruction of attacking missiles. Conceived as a defense against nuclear-armed intercontinental ballistic missiles (ICBMs), its application has broadened to include shorter-ranged non-nuclear tactical and theater missiles. Recently, hypersonic missiles, which travel at 5-10 times the speed of sound, have also become a major concern. As missile defense technology advances, ultra high approach speeds may not be sufficient in order to reach a target and other means of guaranteeing a strike will be needed.
Today, things are becoming even more involved, as one may also have to face swarms of autonomous drones with highly unpredictable behaviour, or low-cost low-tech short range missiles, such as the indiscriminate qassam rockets that are unable to target specific objectives.
We will address two issues:
- How to maneuver a missile in its final approach phase in order to increase survivability.
- How to intercept swarms of fast-moving targets.
Both problems will be discussed from the perspective of complexity and some form of complexity-specific optimization.
Missiles and drones have a finite energy budget, therefore their trajectories are subjected to this quite obvious constraint. However, before we define the problem, let us analyze the complexity of a few 2D trajectories, ranging from a simple straight line to others, based on certain functions. Below, five theoretical trajectories are shown, together with their corresponding complexity. Before one jumps to conclusions, let us remember that complexity measures the amount of structured information. This is why the straight trajectory is most complex while the more involved ones are less complex. This may sound a bit counter-intuitive. However, in a highly involved trajectory – the limit case is that of a chaotic, high-entropy trajectory – the missile ‘forgets’ quickly where it was a few seconds ago. This makes it difficult to predict its future positions, making interception more problematic. In the case of a straight line, prediction of future positions is fairly easy as the trajectory is more ‘structured’ and the trajectory ‘has memory’.

An example of a mixed high/low complexity trajectory is illustrated below.
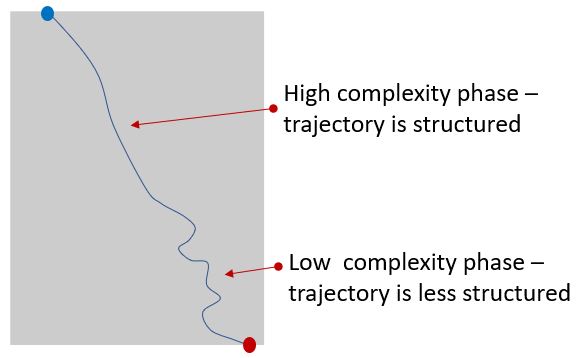
The low-complexity portion of the approach trajectory is characterized by a higher energy expenditure as the missile performs various and sudden high-g maneuvers in order to evade any interceptors. How sudden and how many maneuvers should there be in order to confuse defenses as much as possible is a question that can be answered using our QCM technology.
At this point, the question is how to minimize the complexity of a trajectory within the bounds of a given energy budget and how to formulate the problem. The problem could be formulated from a variational perspective, pretty much as a minimum-time brachistochrone-type problem (this is a 2D formulation):

Where y(x) is the trajectory, x_1 and x_2 are the launch point and target locations in the above figures, L is a function which combines the trajectory shape and energy constraint while J is the functional to be minimized. Now minimizing this functional by solving the associated Euler-Lagrange equation is not easy. Our approach is based on QCM2 – the next-gen version of QCM – and does not facilitate a closed-form solution. However, even if it is approximate, it is very fast.
Swarms of weapons – such as drones – or rockets constitute another class of interesting problems. While drones can have a high degree of autonomy and may behave in a highly unpredictable manner, rockets constitute a totally different kind of threat. However, in both cases the problem is as follows:
- There are N incoming objects/threats
- One disposes of M < N or M<<N interceptors
- What is the best way to intercept the said objects? In other words: when to fire and where to fire?
“Lethal autonomous weapons are dangerously unpredictable in their behaviour. Complex interactions between machine learning-based algorithms and a dynamic operational context make it extremely difficult to predict the behaviour of these weapons in realworld settings. Moreover, the weapons systems are unpredictable by design; they’re programmed to behave unpredictably in order to remain one step ahead of enemy systems” (source).
Imagine having to confront swarms of such weapons, conducting a coordinated attack.

Drones can fly in rapidly changing formations. This can be done in a coordinated manner, following a specific pattern, or simply collectively flying towards a target while avoiding collisions by staying at a minimum distance from neighbors. Less coordinated cases are more problematic as they can lead to unpredictable situations, even though the direction of flight may still be maintained. If one disposes of a sufficiently powerful charge, this may not be an issue.
However, for the sake of discussion, let us assume that there is a relatively small swarm of targets and that the instantaneous Complexity Map is the one shown below. The map can be easily synthesized based on real time radar readings. Ontonix has considerable experience in this field. The trick lies in knowing how to organize streaming radar data, but that is another issue altogether.
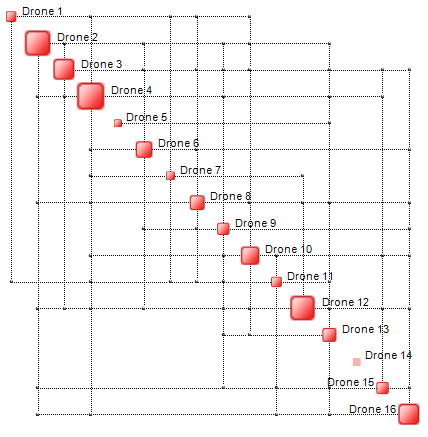
There are clearly ‘leaders’ – drones 2, 4, 12 and 16 – and ‘followers’. Drone 14 appears to be ‘independent’ while others move in unison. It may be damaged or engaged in some particularly ‘creative’ maneuver. The point is, however, how to best attack with M assets N incoming objects in order to create the most damage.
The simplest and most interesting case is when M<<N, i.e. large number of incoming objects, and a much smaller number of interceptors. One targets the leading drones in order to cause the largest possible disruption of the formation. The best time to do so is when complexity is maximum, i.e. when the formation is more coordinated and tight.
Keep in mind that the above Complexity Map may retain its structure for a short time and this structure may oscillate between a number of configurations, having a minimum and maximum complexity. The case of lowest formation complexity is shown below:

In this case taking out drone 14 creates much damage to the formation but one would still be left with 15 remaining drones.
More to come.

Interesting article. Should attract a lot of interests.
Sent from my iPhone
LikeLiked by 1 person